Jan-Nico Zaech
Hi, my name is Nico. I am a research scientist at INSAIT where I lead the robotics team working on robotic foundation models (VLAs) and embodied 3D scene understanding. My research revolves around the efficient use of data in end-to-end algorithms for autonomous robotic systems, moving beyond costly robotic demonstrations.


Generalist Robotic Foundation Models
Robotic foundation models hold the potential to bring robotic systems into our daily lives. My work aims at teaching these systems with large-scale data beyond demonstrations only.
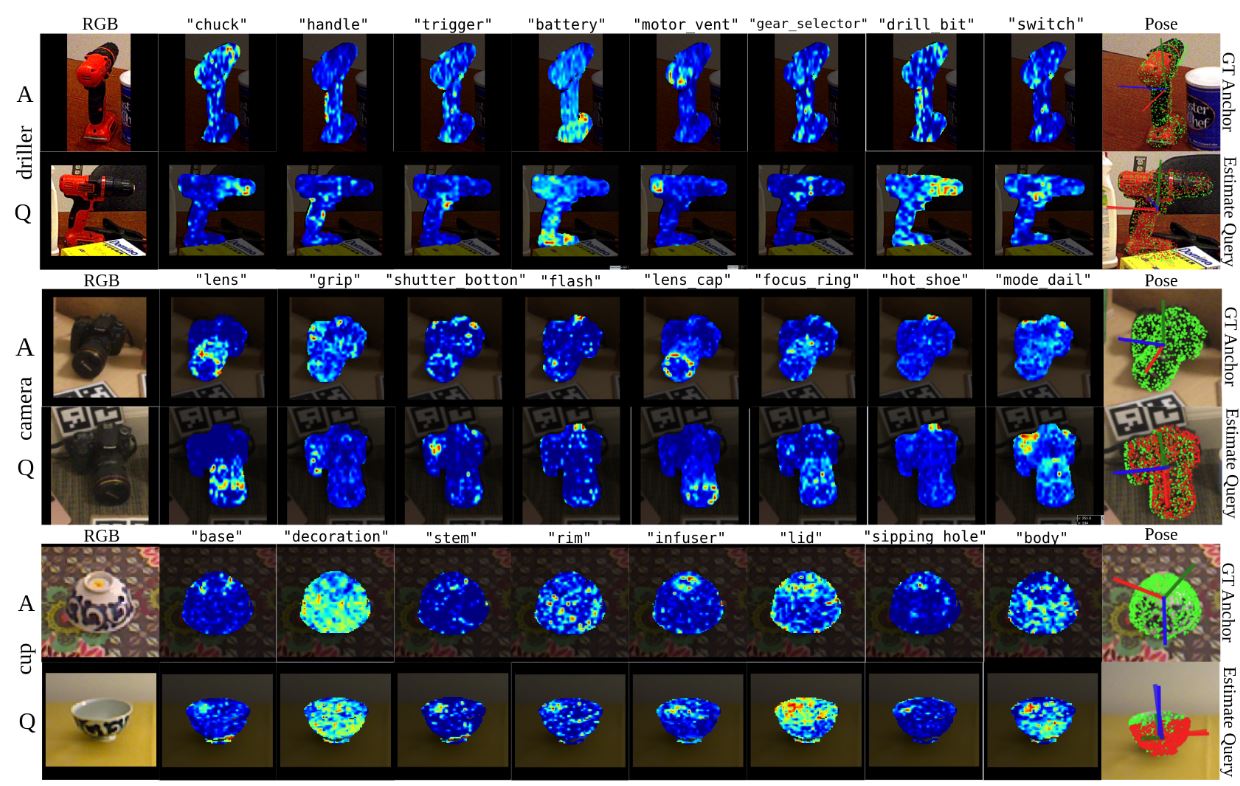
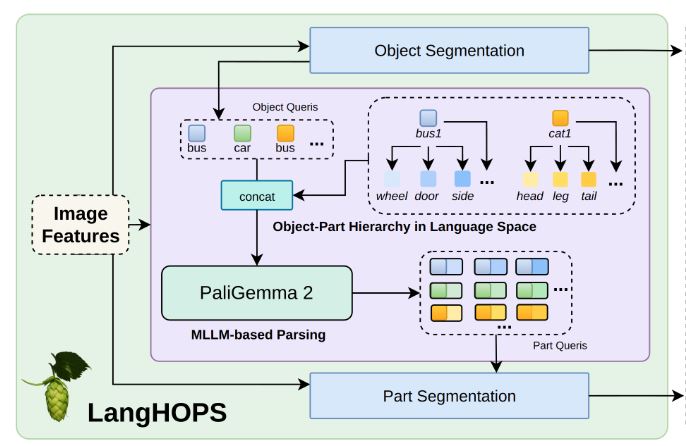
AI for Embodied 3D Understanding
Embodied 3D models enable machines to understand the world around us. My work builds AI models that are capable of reasoning about interactions directly in 3D space.
Biography
I am currently a research scientist at INSAIT where I lead a team working on the various aspects of foundation models for robotic applications covering end-to-end control and embodied scene understanding.
I recieved my Ph.D. from ETH Zürich in 2024. During my studies I worked on the TRACE project at the Computer Vision Lab, with Prof. Luc Van Gool and Dr. Martin Danelljan. Alongside my main project, I served as the supervisor for the ETH RoboCup team NomadZ and have managed the institute’s major cluster investment.
I received my M.Sc. in Advanced Signal Processing and Communications Engineering from FAU Erlangen-Nürnberg with highest distinction. During my Master’s thesis I worked at the Johns Hopkins University with Prof. Mathias Unberath on autonomous CT imaging systems and realistic x-ray simulation. Furthermore, I gained research experience in radio astronomy image reconstruction from my involvement with the Square Kilometer Array at Callaghan Innovation New Zealand. On the industry side, I worked with Intel and interned at AWS.
News
-
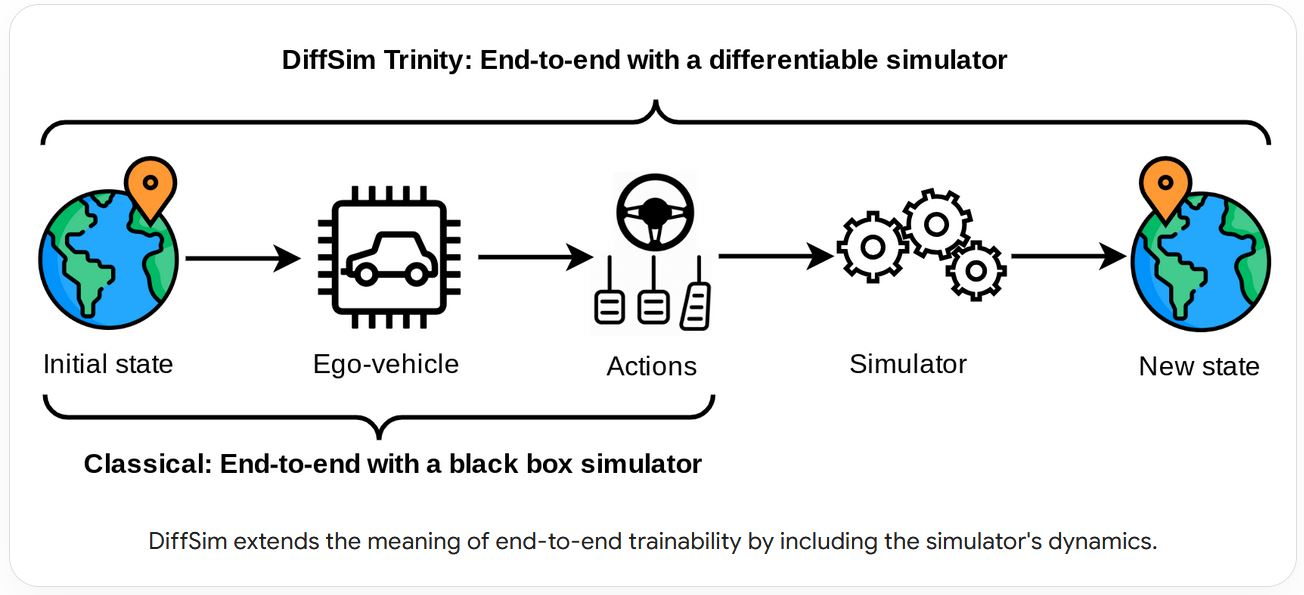
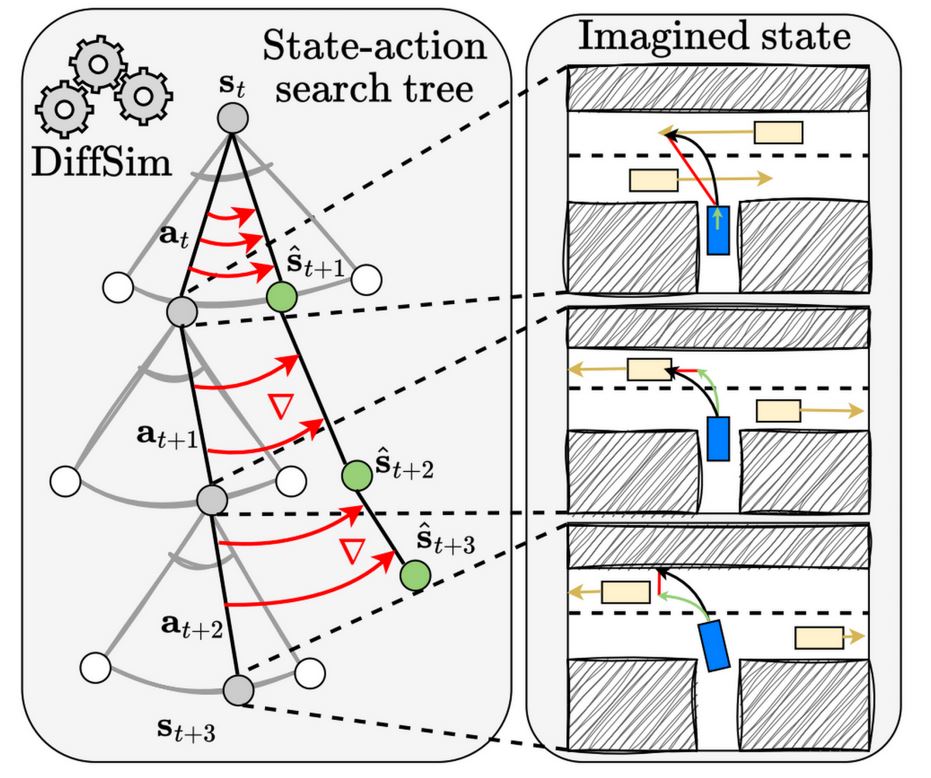
Building The DiffSim Trinity
INSAIT released the DiffSim Trinity, comprising our work on differentiable simulation for autonomous driving.
-

Articulate3D accepted at ICCV 2025
Our paper Articulate3D has been accepted at ICCV 2025. The dataset enables high-quality, interaction-aware 3D understanding for embodied AI applications.
-
Patent Granted: X-ray Machine Learning Model
The patent based on my Master’s thesis work at the Johns Hopkins University has been granted.