Asen Nachkov, Jan‑Nico Zaech, Danda Pani Paudel, Xi Wang, Luc Van Gool
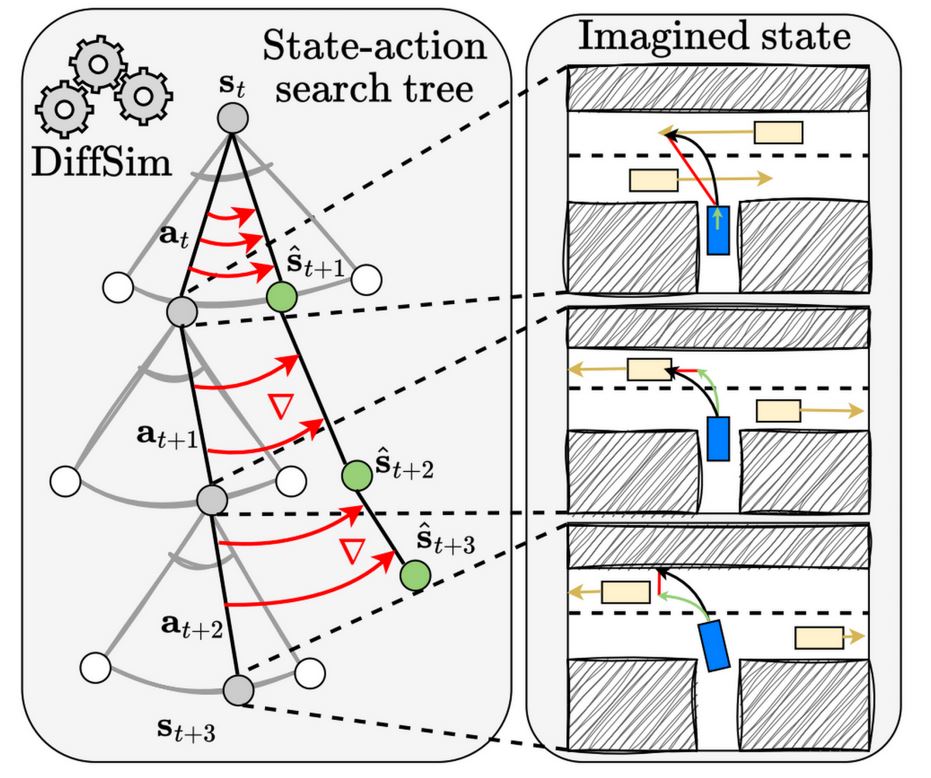
This work introduces Differentiable Simulation for Search (DSS) to address the challenge of planning safe and efficient trajectories for autonomous vehicles. DSS uses a differentiable simulator (Waymax) as both a dynamics model and a critic, enabling gradient‑based search over action sequences. Unlike imitation‑learning or reinforcement‑learning approaches, DSS directly optimizes long‑term rewards by differentiating through the simulation. Experiments show that DSS produces smoother tracking behavior and superior path‑planning accuracy compared with existing imitation and RL baselines.
Find more information in our DiffSim Trinity series https://diffsimtrinity.insait.ai/search/