Our work on differentiable simulation in the DiffSim Trinity has been released by INSAIT!
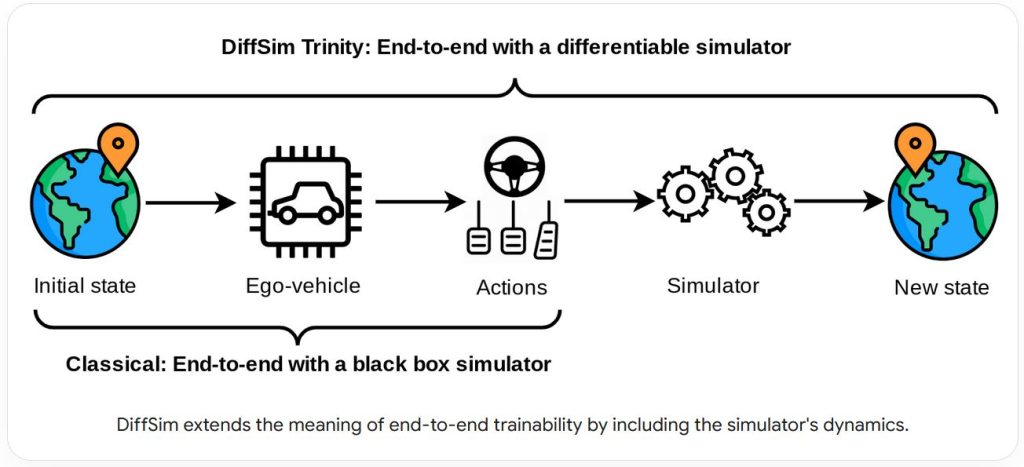
Today’s end-to-end driving models map sensors to actions, but treat physical dynamics as a black box. Differentiable simulation resolves this limitation: gradients flow through physical world dynamics, allowing models to learn how actions cause outcomes, not just which actions to take. In turn, this enables data-efficient training, direct optimization for safety and comfort, and reasoning about possible future events.
DiffSim Trinity puts this idea to practice and comprises three works on Control, Planning and Search accepted at IROS and AAAI.
https://diffsimtrinity.insait.ai
Contributors:
Asen Nachkov, Jan-Nico Zaech, Danda Pani Paudel, Xi Wang, Davide Scaramuzza, Luc Van Gool