Publications
-
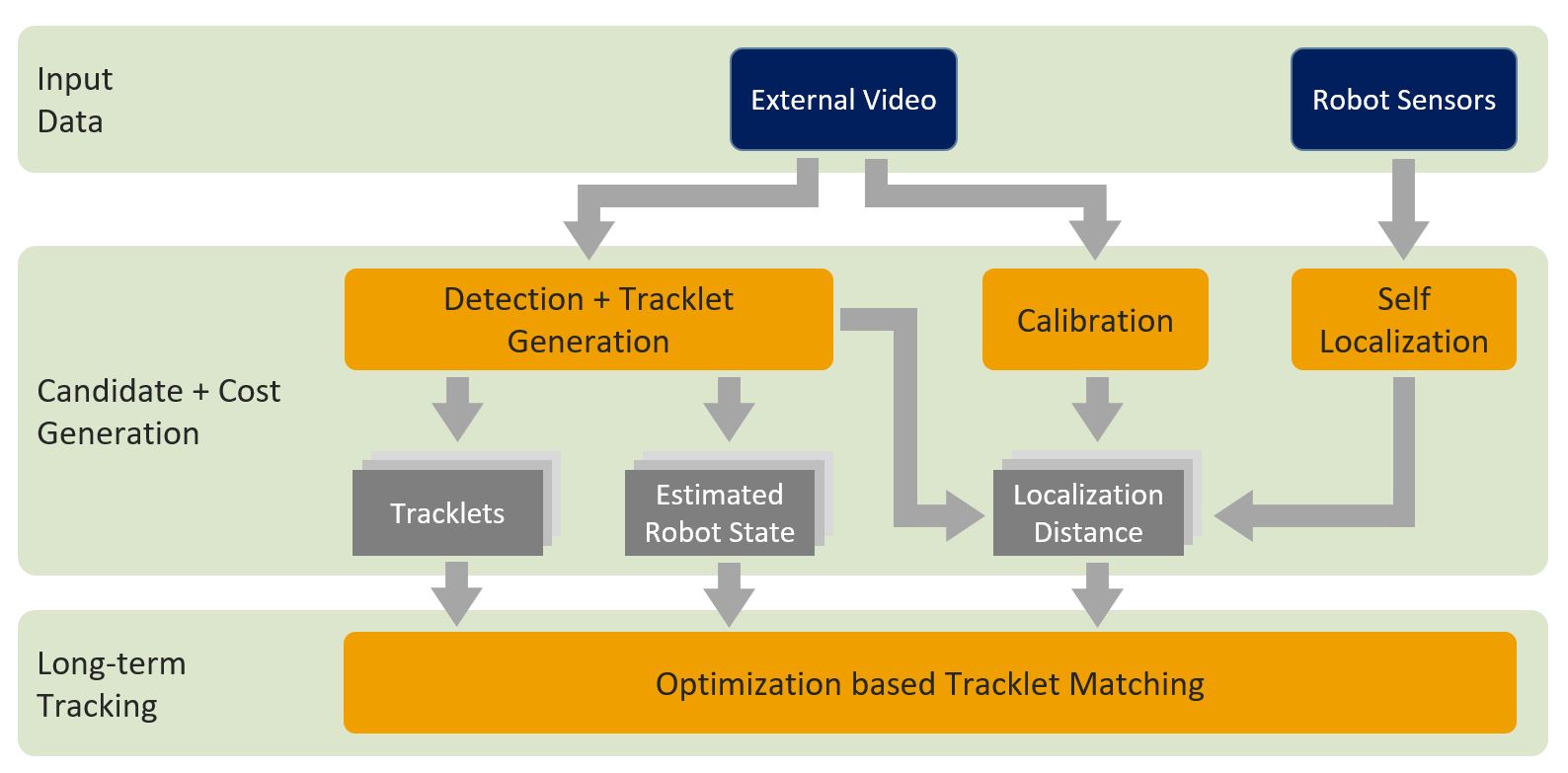
Optimizing Long-Term Player Tracking and Identification in NAO Robot Soccer by fusing Game-state and External Video
A collaborative sensing approach for multi object tracking of robots.
-
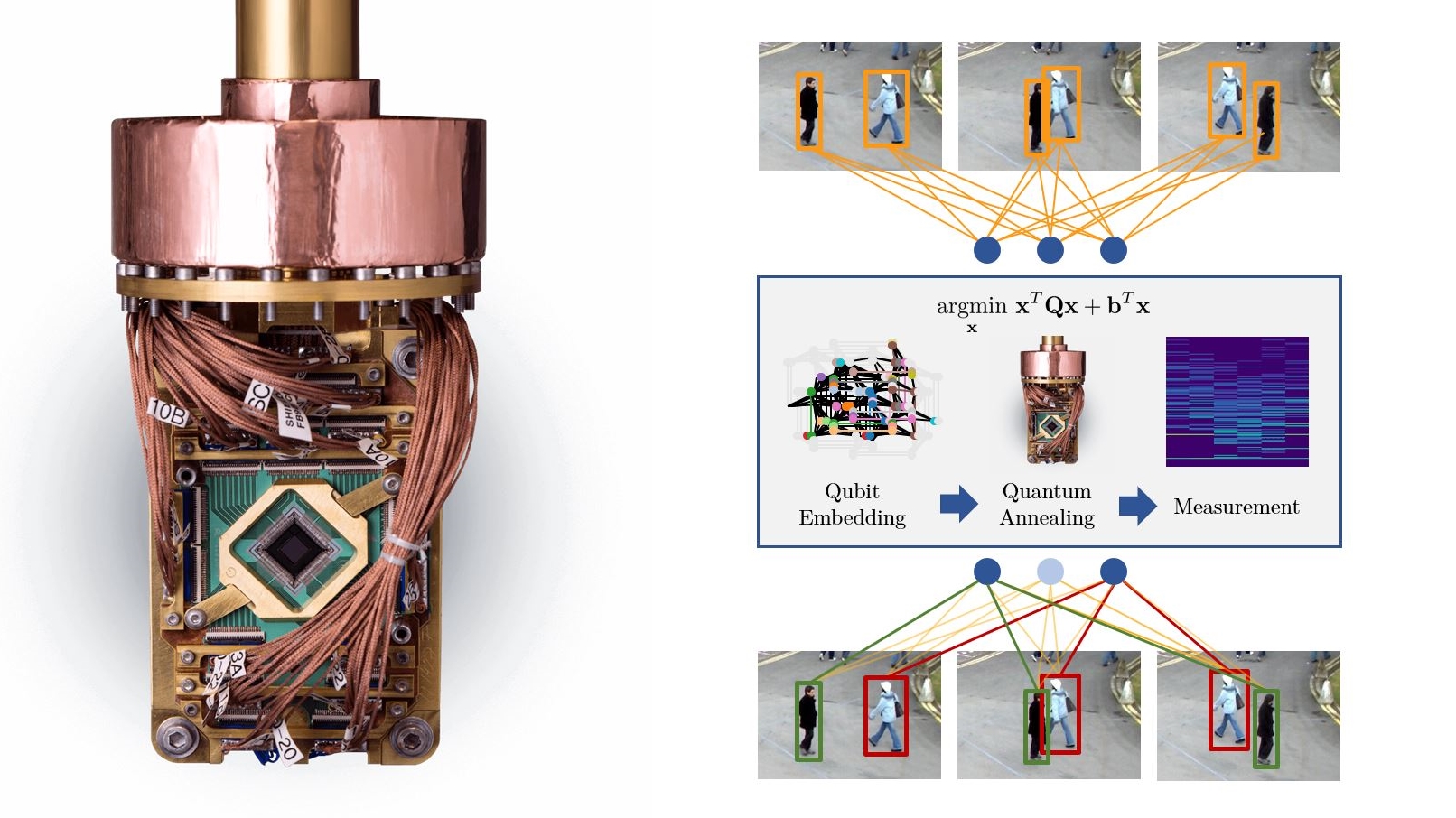
Adiabatic Quantum Computing for Multi Object Tracking
A Multi-Object Tracking algorithm that can be solved with Adiabatic Quantum Computing
-
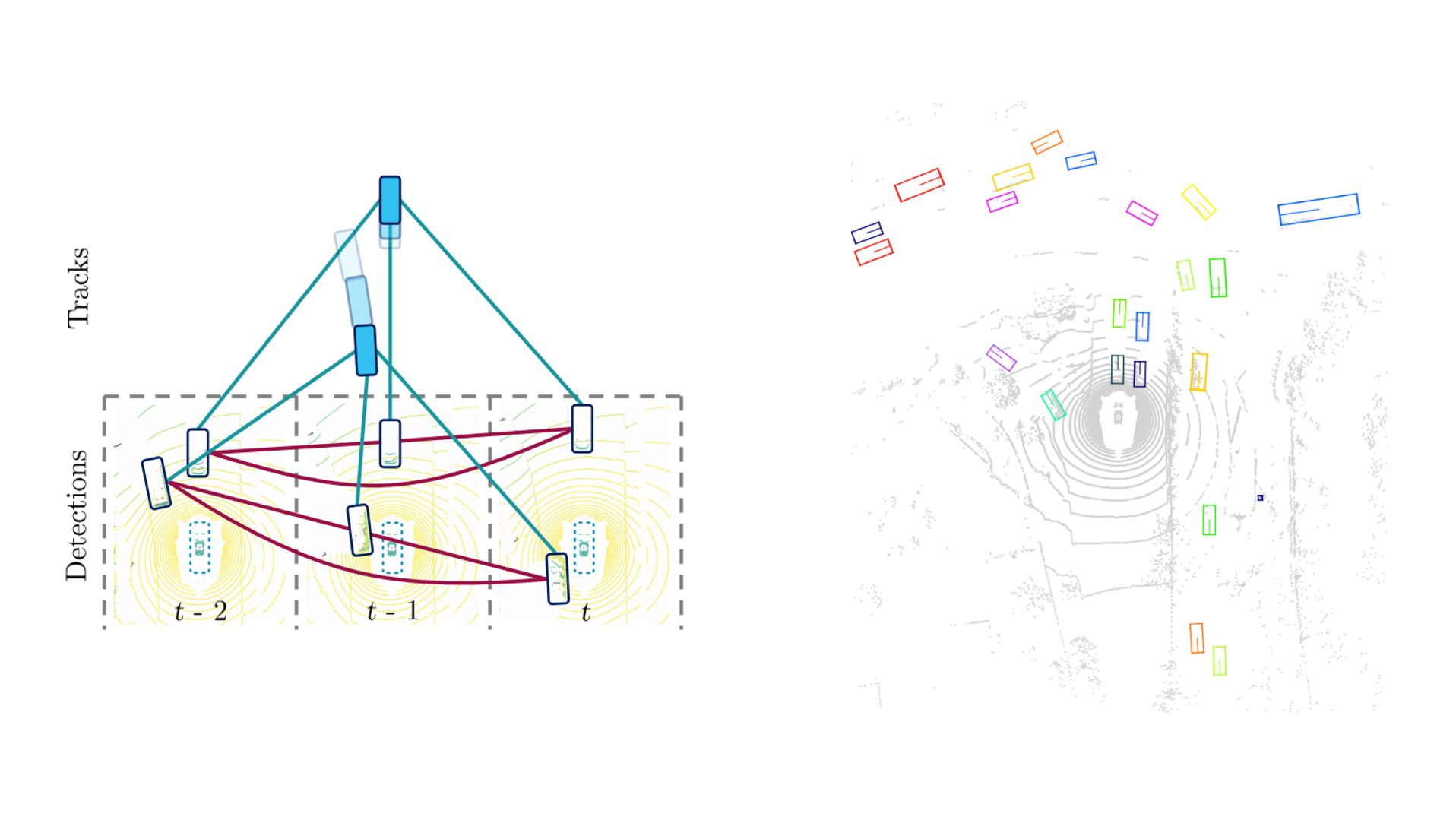
Learnable Online Graph Representations for 3D Multi-Object Tracking
An online 3D Multi-Object Tracking method based on graph neural networks.
-
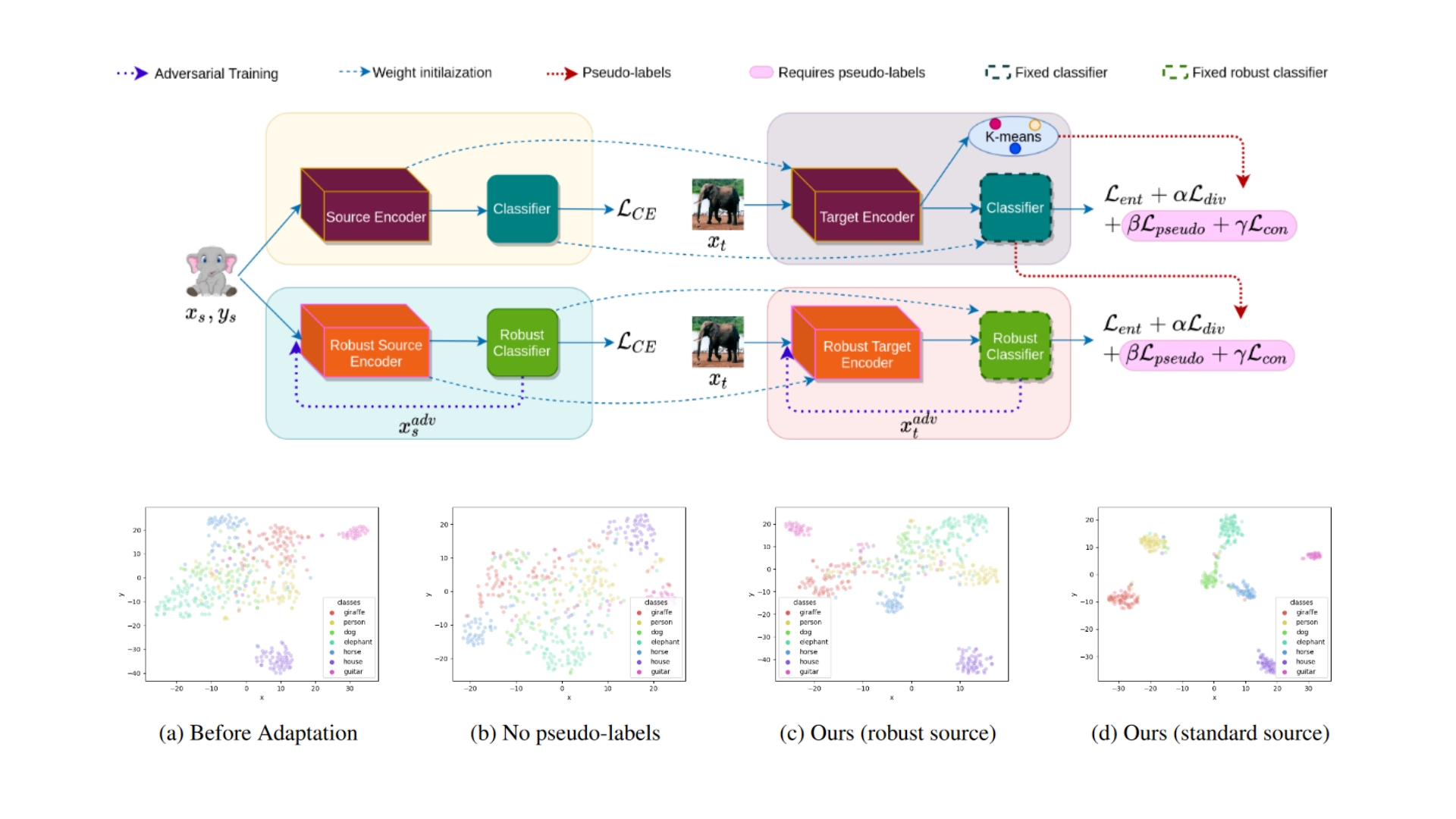
Unsupervised robust domain adaptation without source data
A method that keeps a network robust against adversarial images during source-free domain adaptation.
-
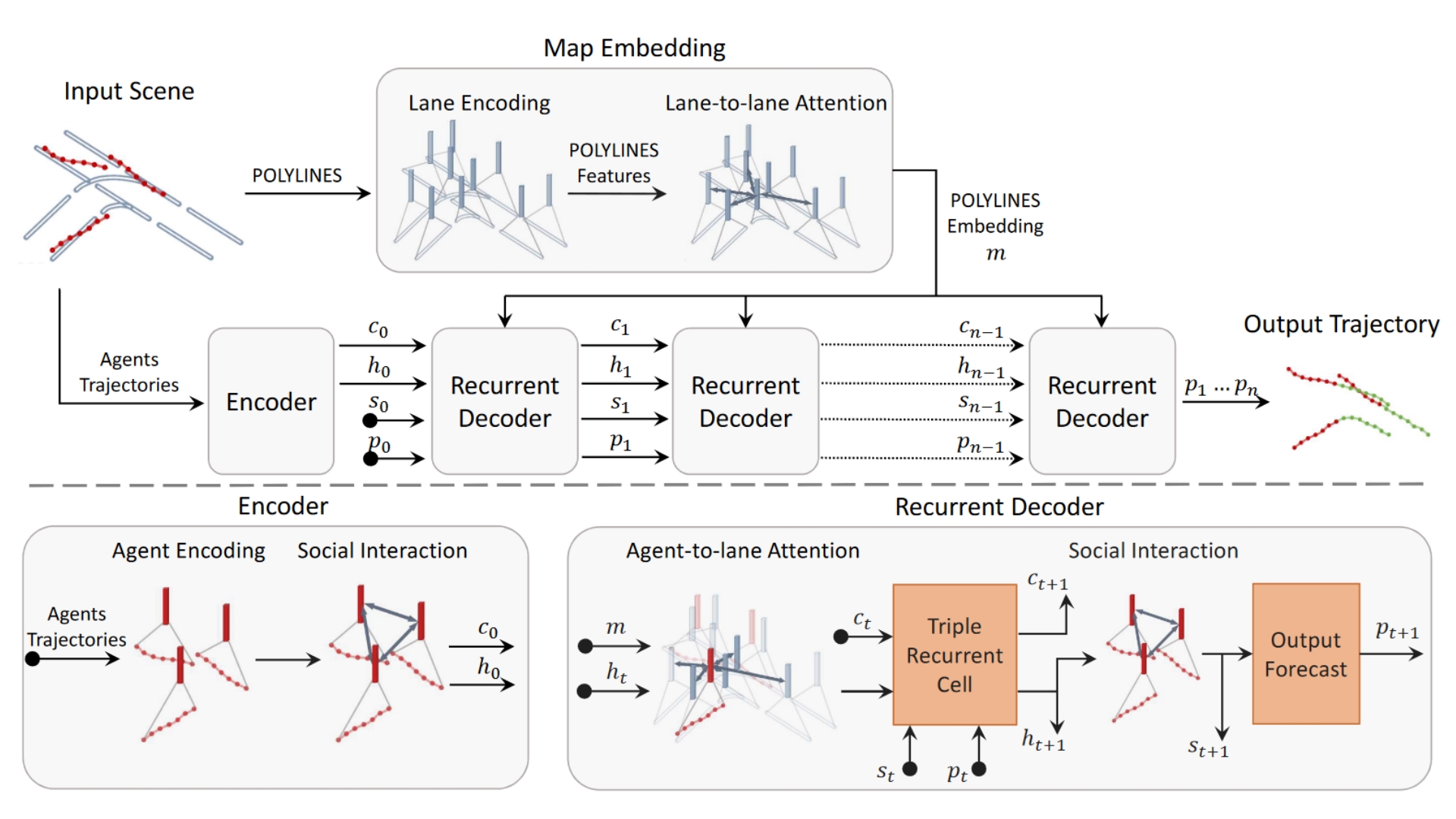
Decoder fusion RNN: Context and interaction aware decoders for trajectory prediction
A multi-headed attention based method for vehicle trajectory prediction using map data encoded on a graph.
-
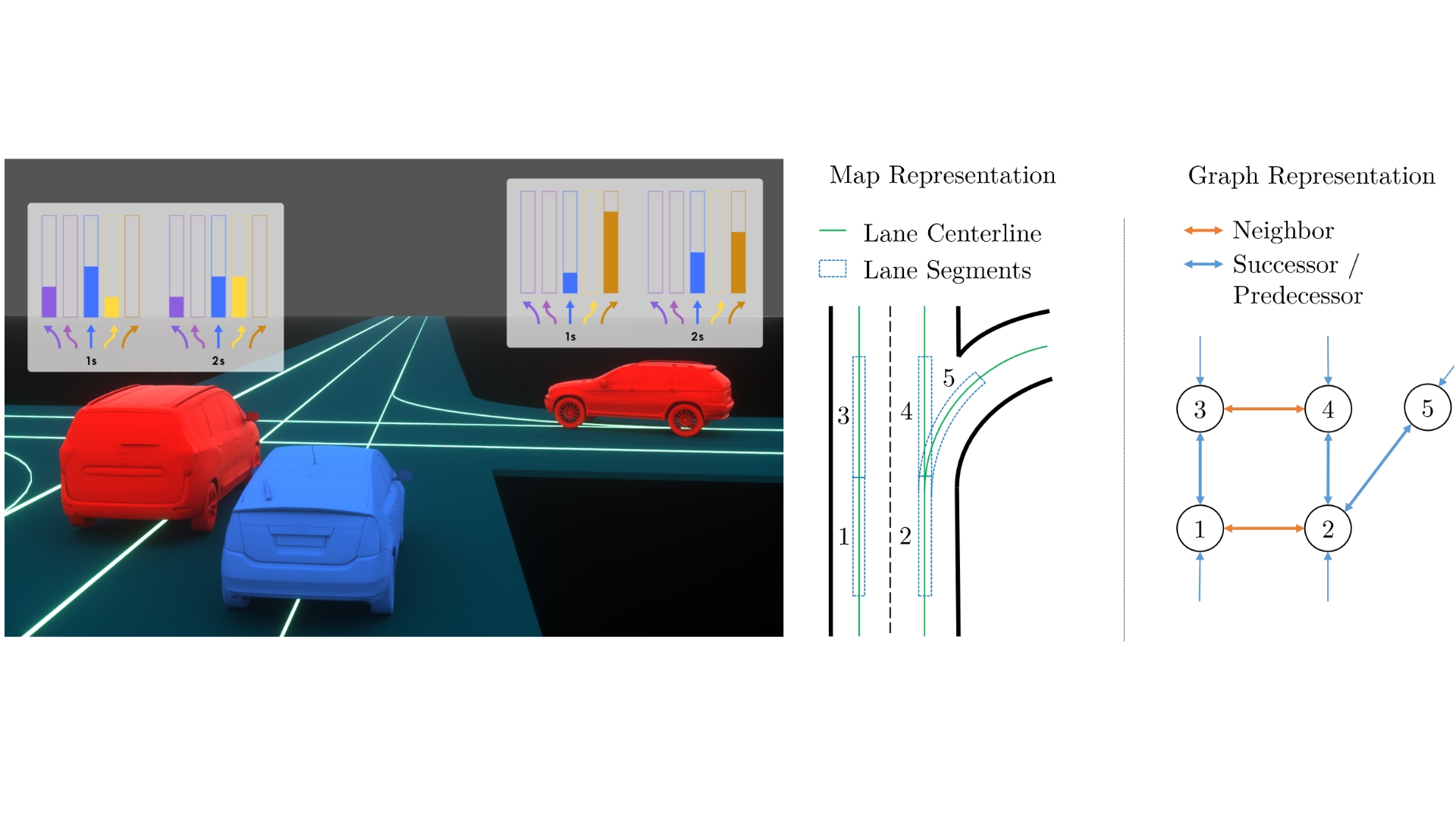
Action sequence predictions of vehicles in urban environments using map and social context
Views the traffic agent trajectory prediction task form a classification perspective and proposes a method to automatically annotate trajectory data by using graph-based maps.
-
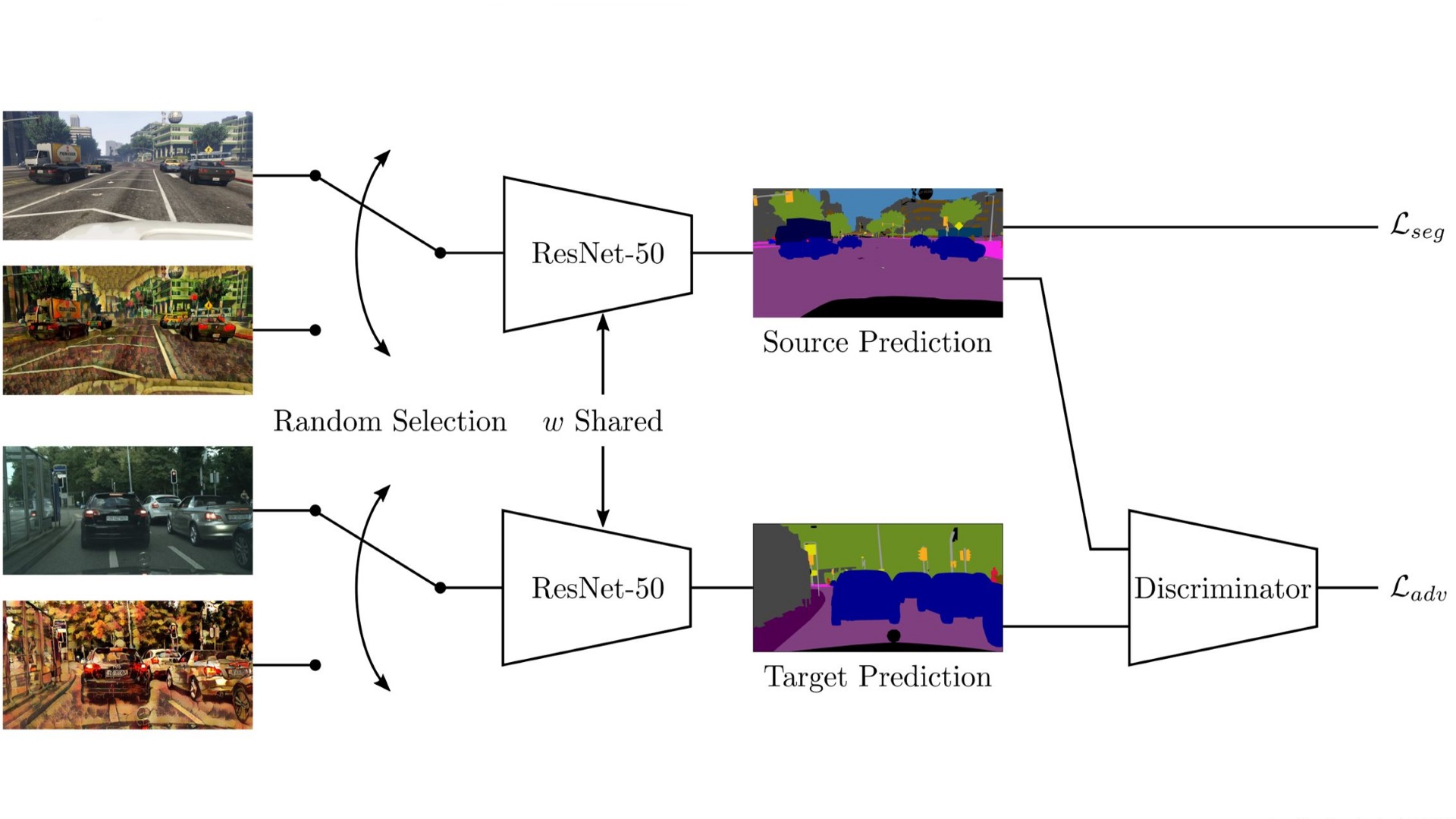
Texture Underfitting for Domain Adaptation
A method to use image structure in domain adaptation implemented as a two stage training process.
-
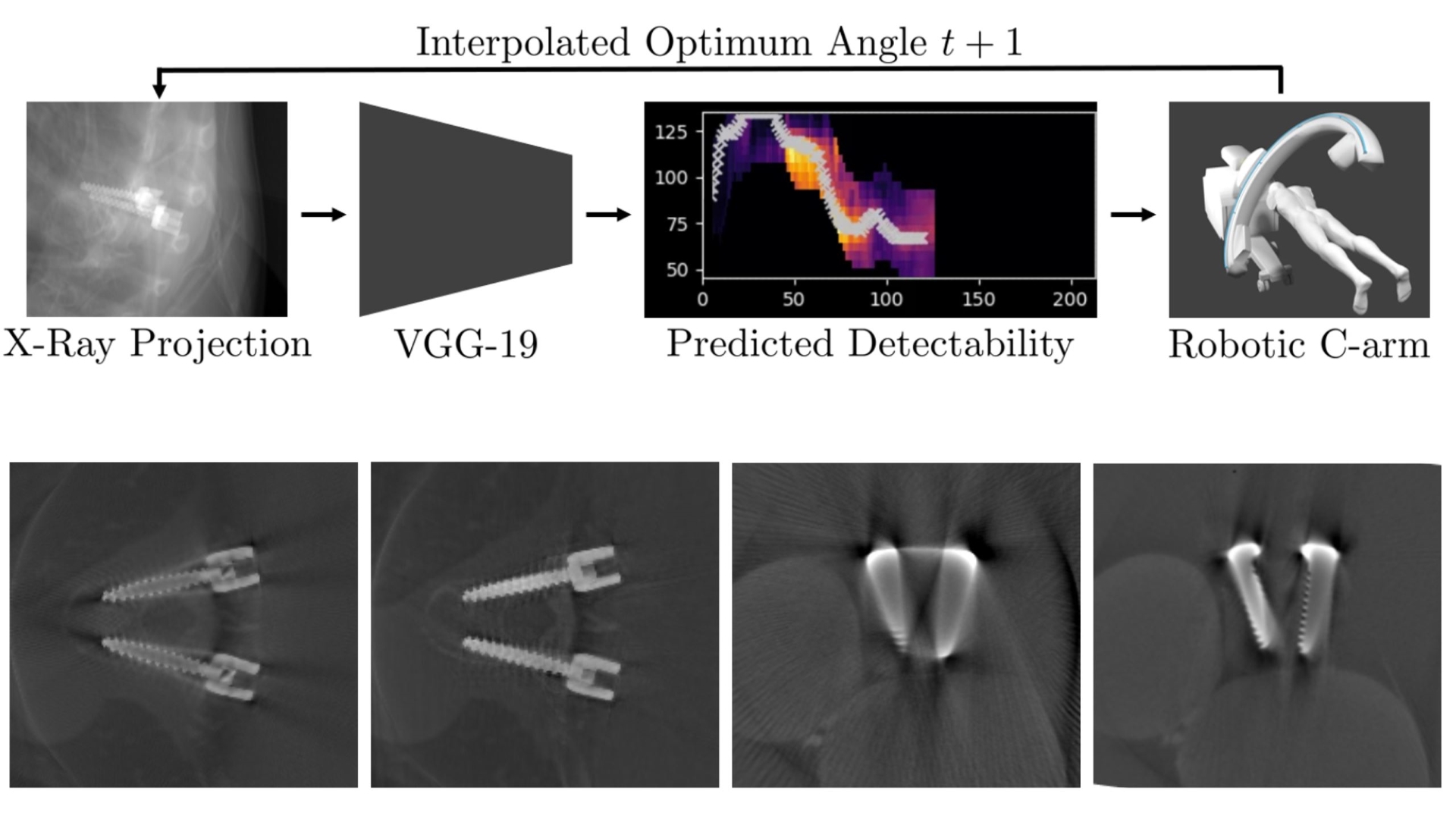
Learning to avoid poor images: Towards task-aware C-arm cone-beam CT trajectories
A robotic CBCT system that that predicts an acquisition trajectory optimized online during a scan.