Action prediction
-
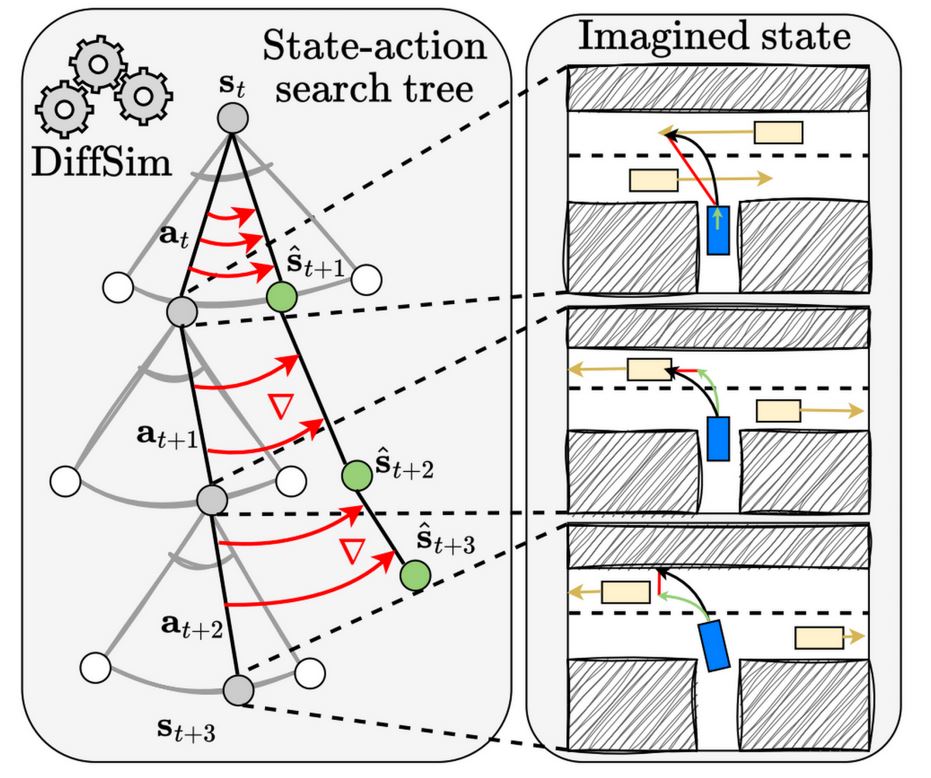
Autonomous Vehicle Path Planning by Searching With Differentiable Simulation
Asen Nachkov, Jan‑Nico Zaech, Danda Pani Paudel, Xi Wang, Luc Van Gool This work introduces Differentiable Simulation for Search (DSS) to address the challenge of planning safe and efficient trajectories for autonomous vehicles. DSS uses a differentiable simulator (Waymax) as both a dynamics model and a critic, enabling gradient‑based search over action sequences. Unlike imitation‑learning…
-
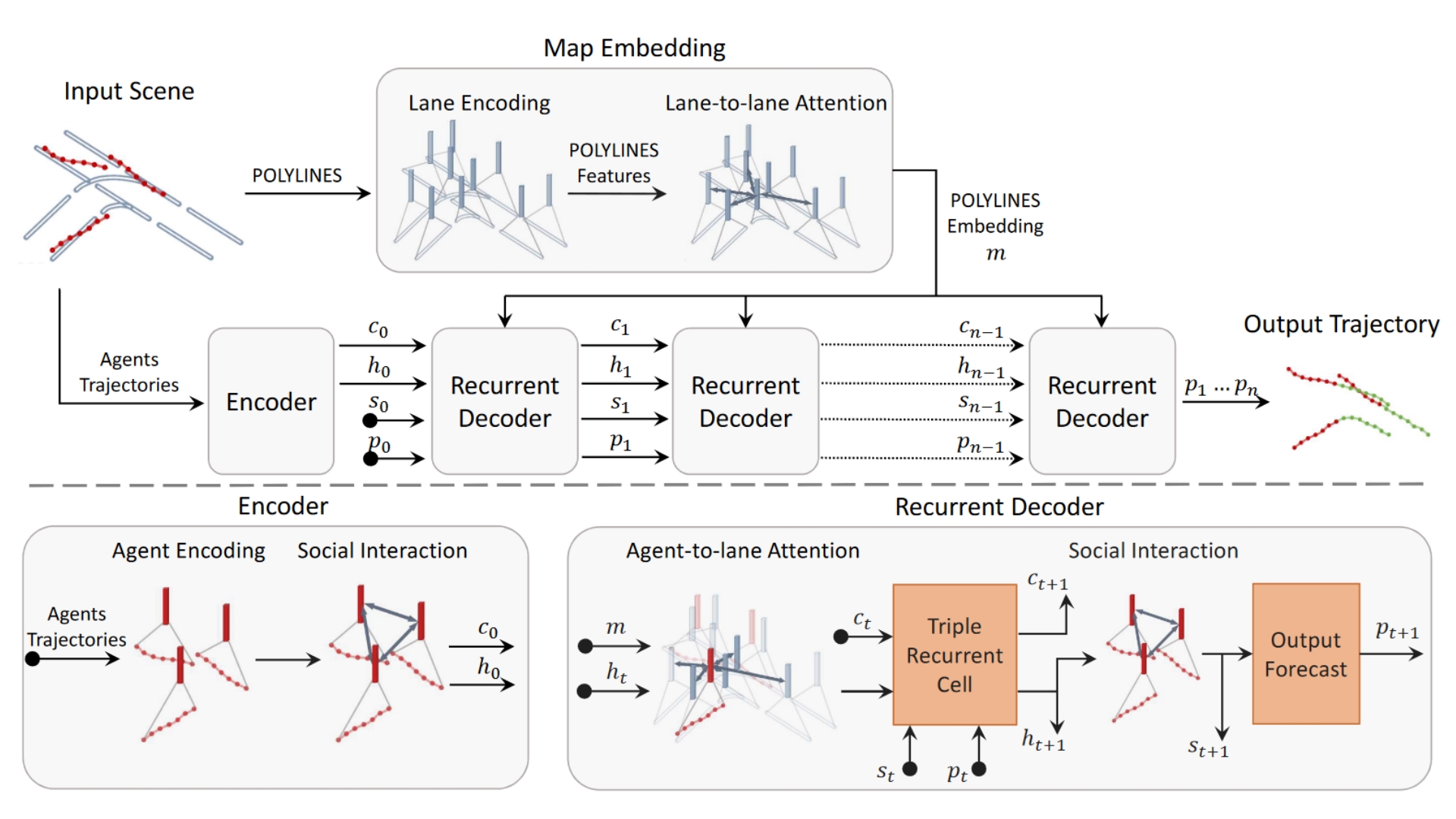
Decoder fusion RNN: Context and interaction aware decoders for trajectory prediction
A multi-headed attention based method for vehicle trajectory prediction using map data encoded on a graph.
-
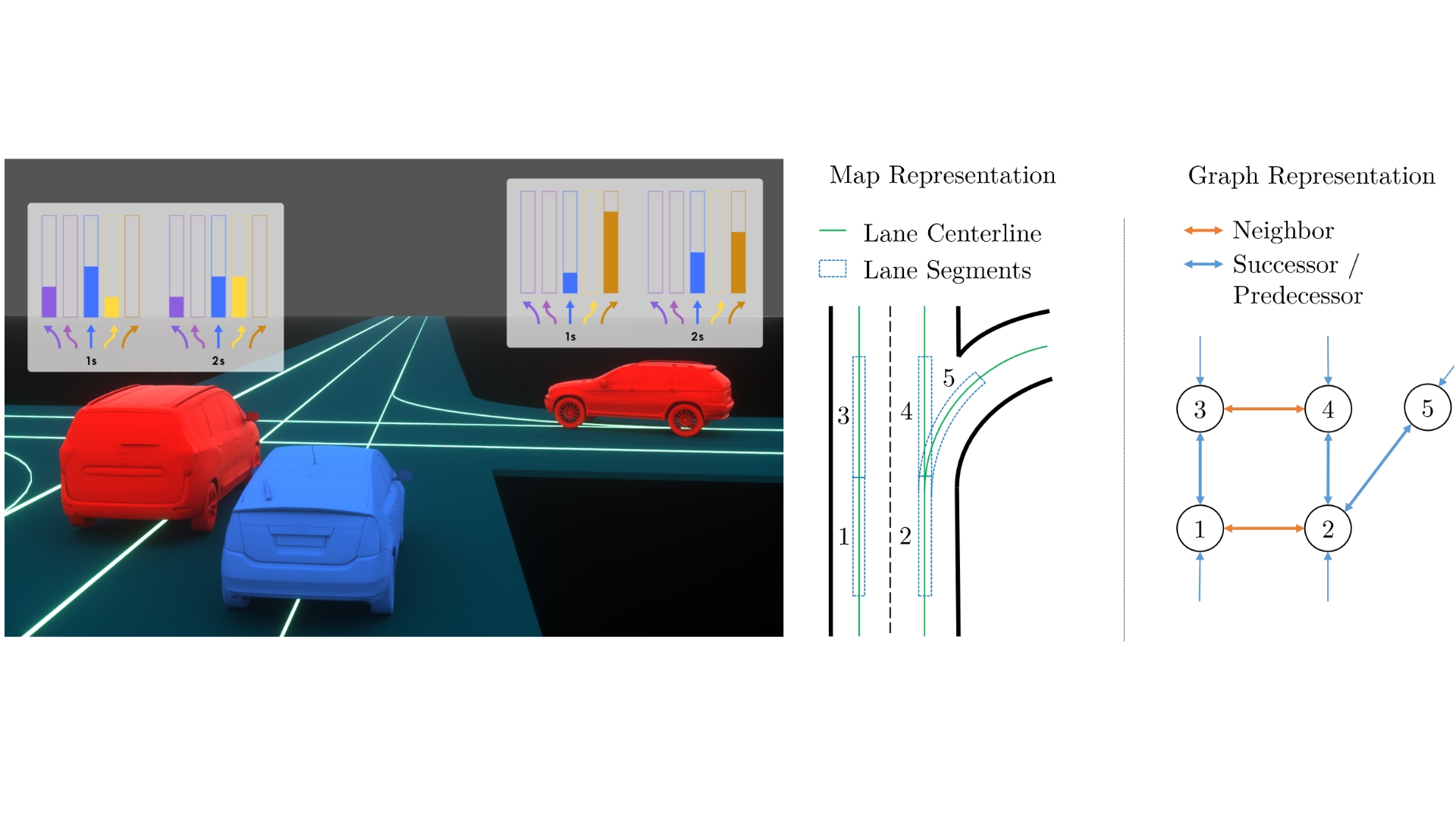
Action sequence predictions of vehicles in urban environments using map and social context
Views the traffic agent trajectory prediction task form a classification perspective and proposes a method to automatically annotate trajectory data by using graph-based maps.