Autonomous Systems
-
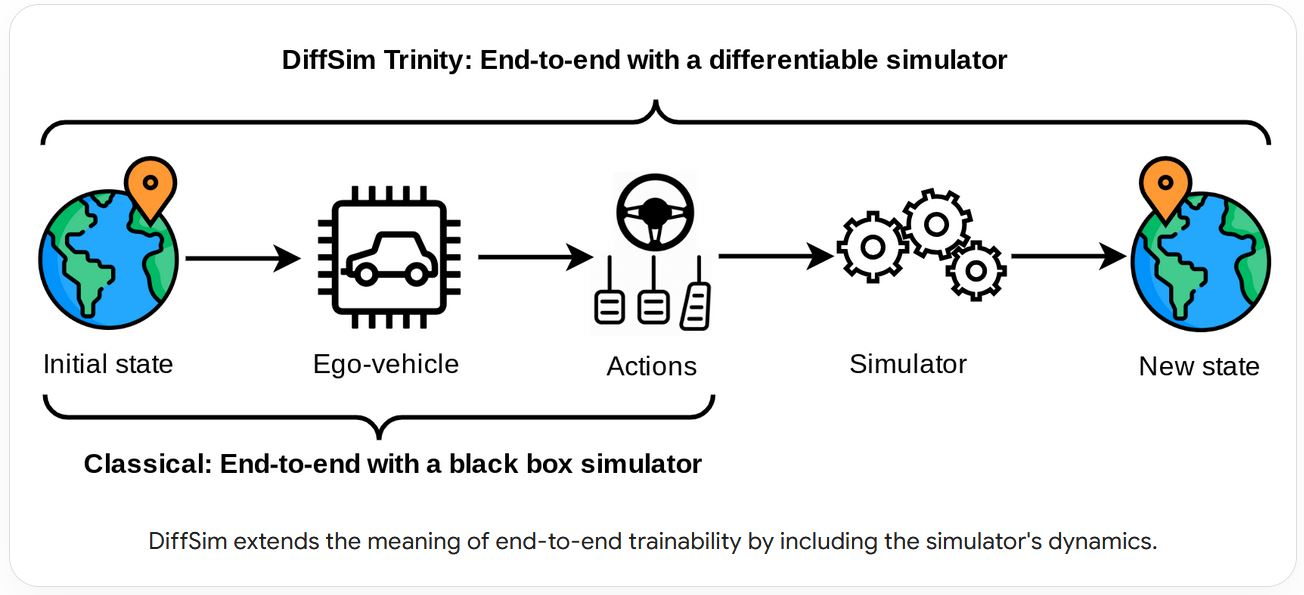
Building The DiffSim Trinity
INSAIT released the DiffSim Trinity, comprising our work on differentiable simulation for autonomous driving.
-
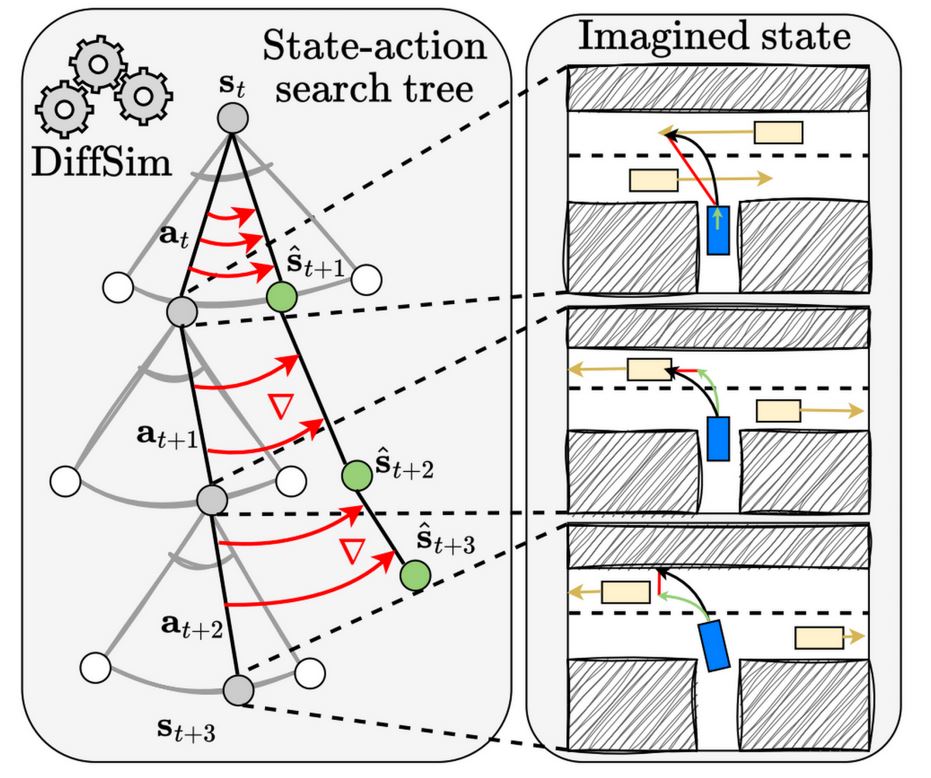
Autonomous Vehicle Path Planning by Searching With Differentiable Simulation
Asen Nachkov, Jan‑Nico Zaech, Danda Pani Paudel, Xi Wang, Luc Van Gool This work introduces Differentiable Simulation for Search (DSS) to address the challenge of planning safe and efficient trajectories for autonomous vehicles. DSS uses a differentiable simulator (Waymax) as both a dynamics model and a critic, enabling gradient‑based search over action sequences. Unlike imitation‑learning…
-
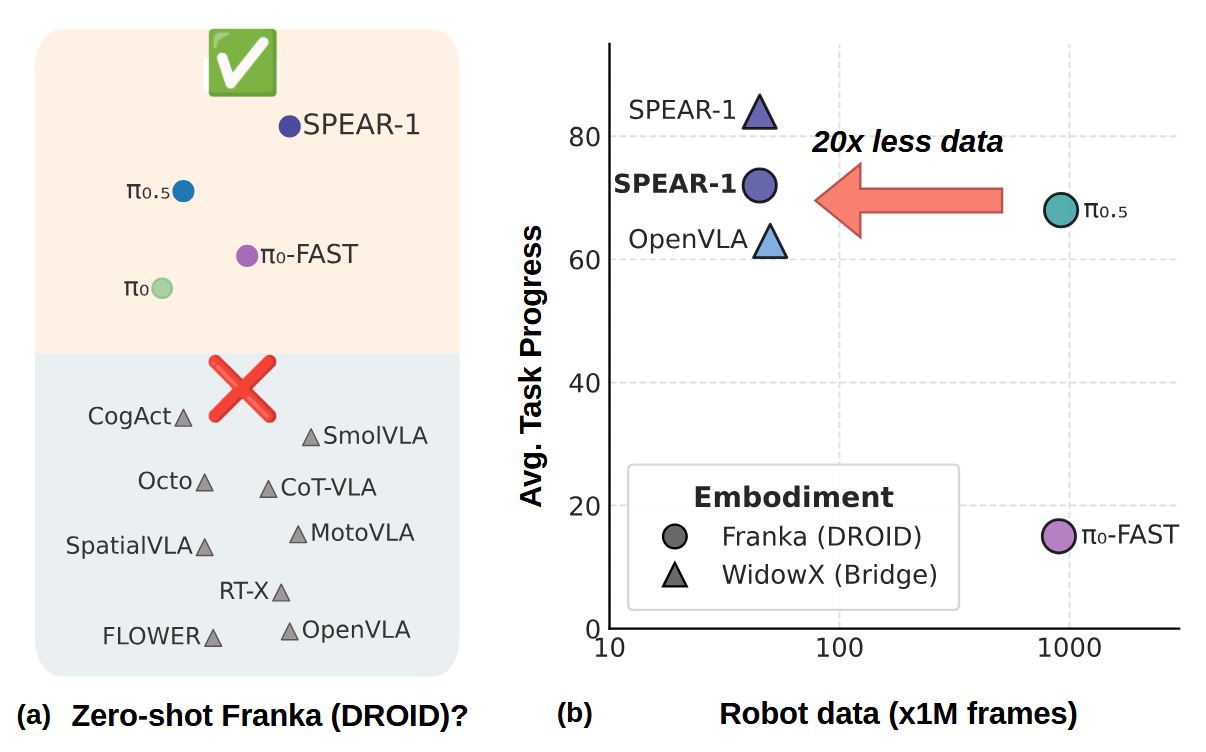
SPEAR-1: Scaling Beyond Robot Demonstrations via 3D Understanding
Nikolay Nikolov, Giuliano Albanese, Sombit Dey, Aleksandar Yanev, Luc Van Gool, Jan-Nico Zaech, Danda Pani Paudel SPEAR‑1 addresses limitations of robot imitation learning by fusing 3D perception with language‑based control. SPEAR-1 introduces a 3D‑aware vision–language model (SPEAR‑VLM) that jointly reasons about 3D scene geometry and human language instructions. This model powers a Vision‑Language-Action Model that…
-
ReVLA@ICRA: Visual Robustness for Robotic Foundation Models
We have presented ReVLA, our first work at ICRA 2025 in Atlanta.
-
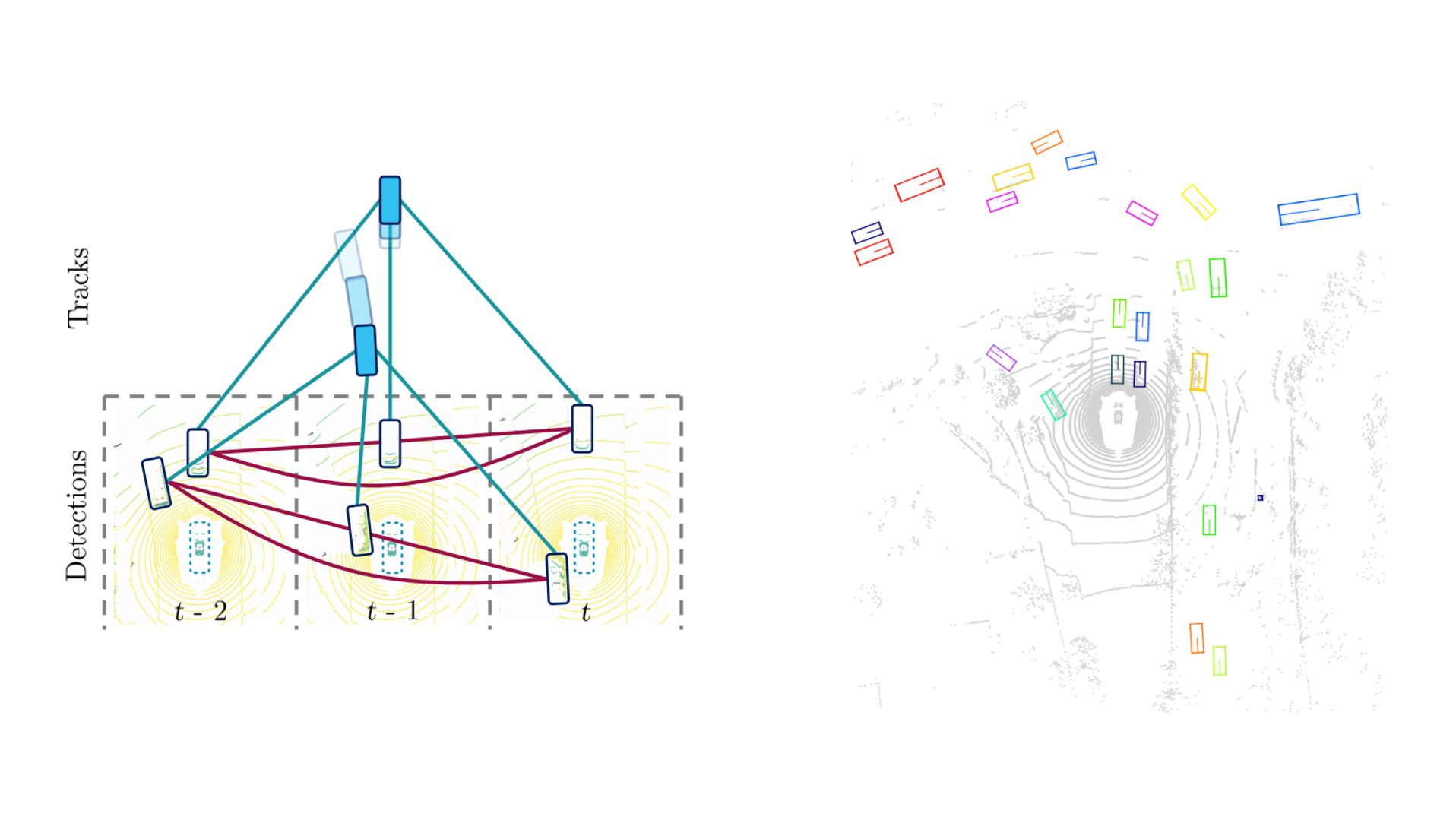
Learnable Online Graph Representations for 3D Multi-Object Tracking
An online 3D Multi-Object Tracking method based on graph neural networks.
-
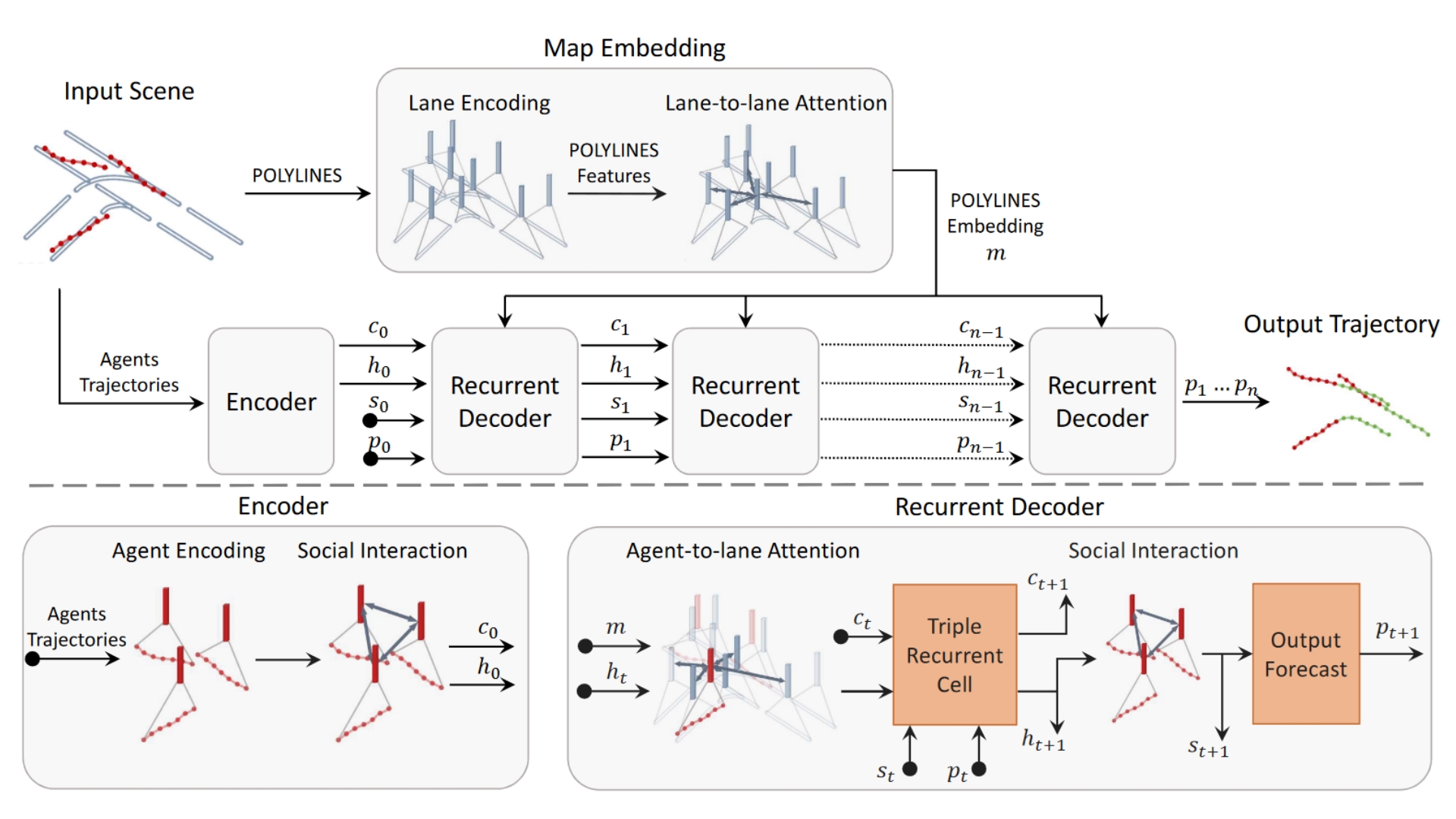
Decoder fusion RNN: Context and interaction aware decoders for trajectory prediction
A multi-headed attention based method for vehicle trajectory prediction using map data encoded on a graph.
-
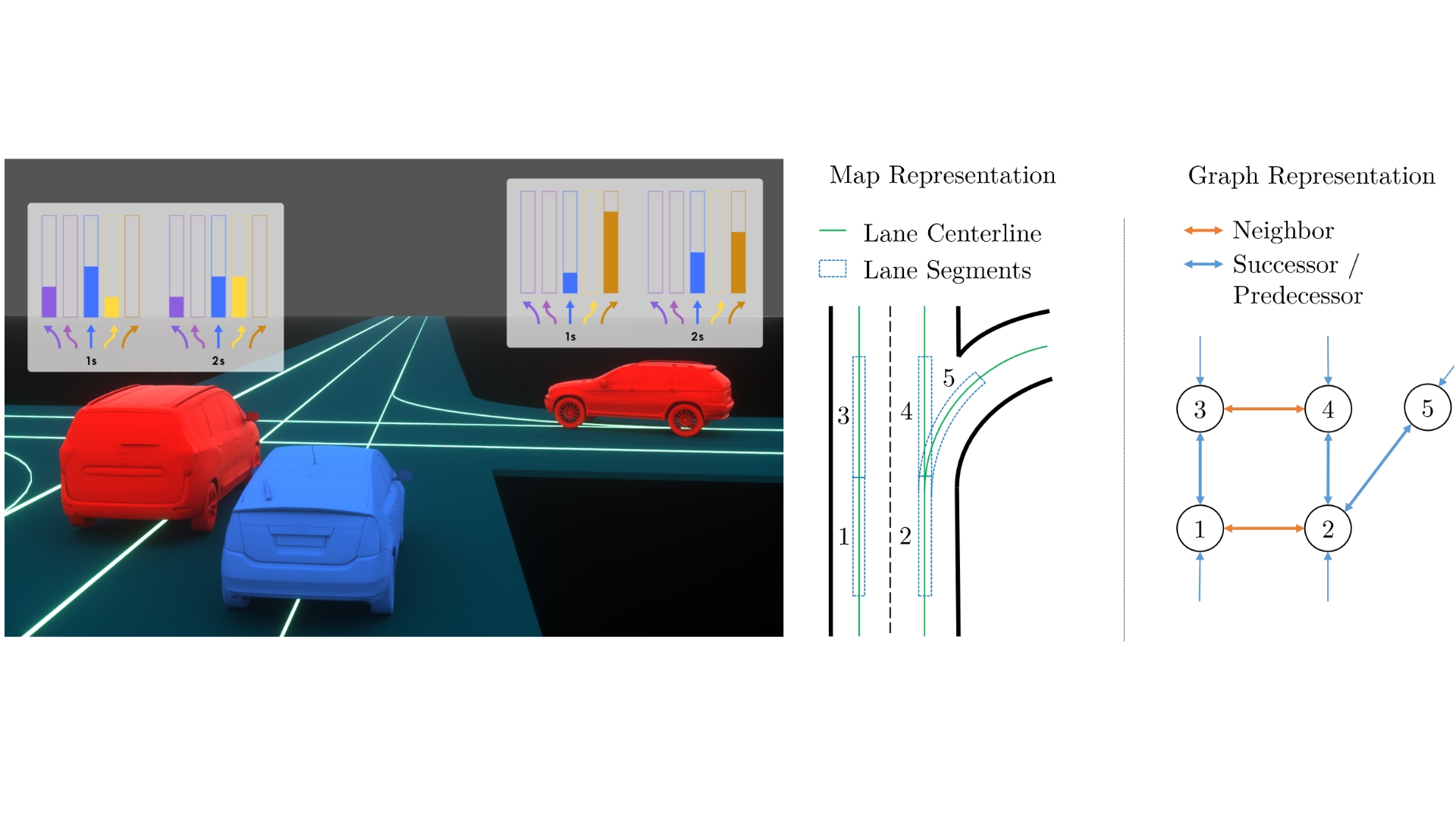
Action sequence predictions of vehicles in urban environments using map and social context
Views the traffic agent trajectory prediction task form a classification perspective and proposes a method to automatically annotate trajectory data by using graph-based maps.
-
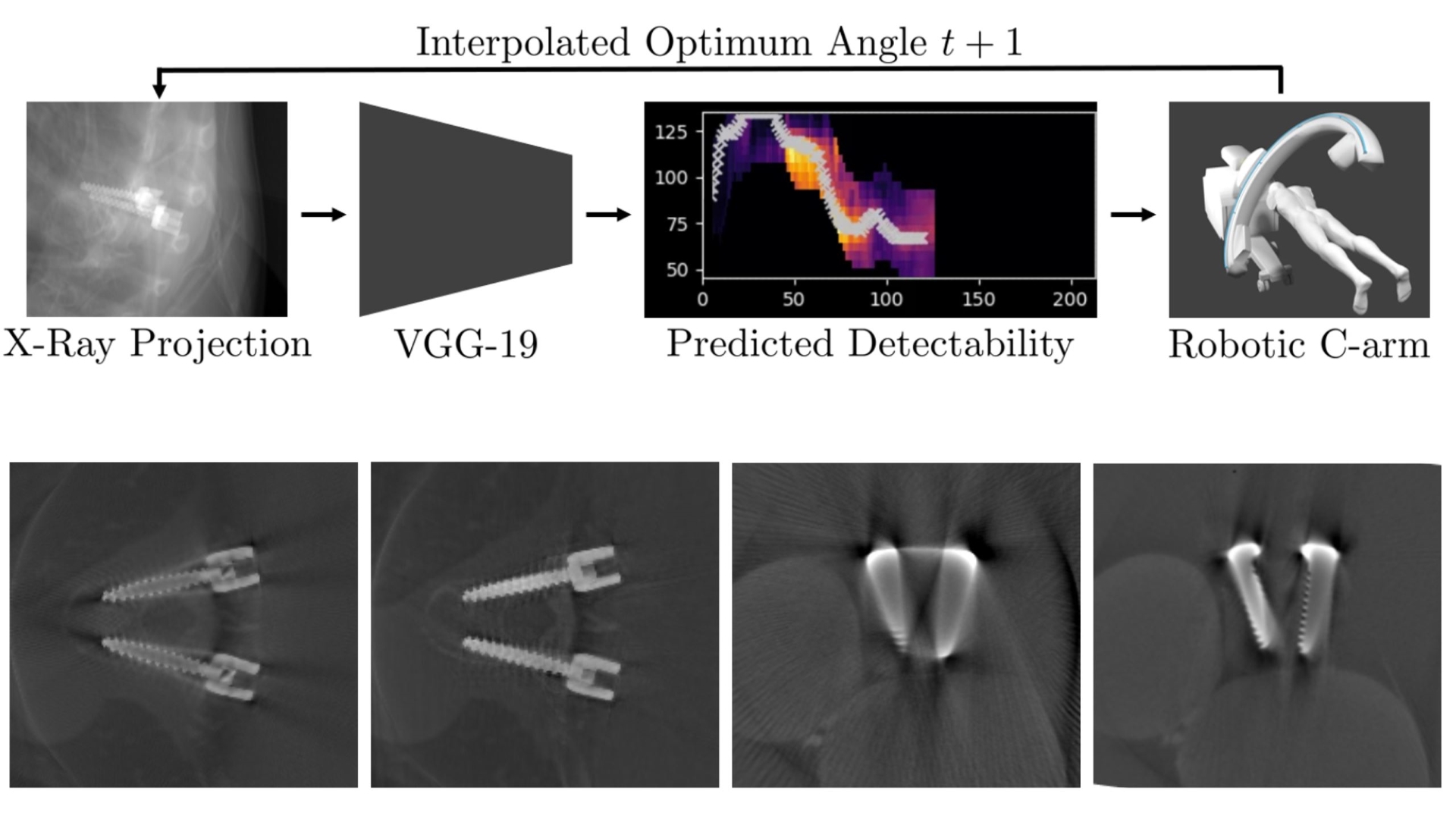
Learning to avoid poor images: Towards task-aware C-arm cone-beam CT trajectories
A robotic CBCT system that that predicts an acquisition trajectory optimized online during a scan.