Foundation Models
-
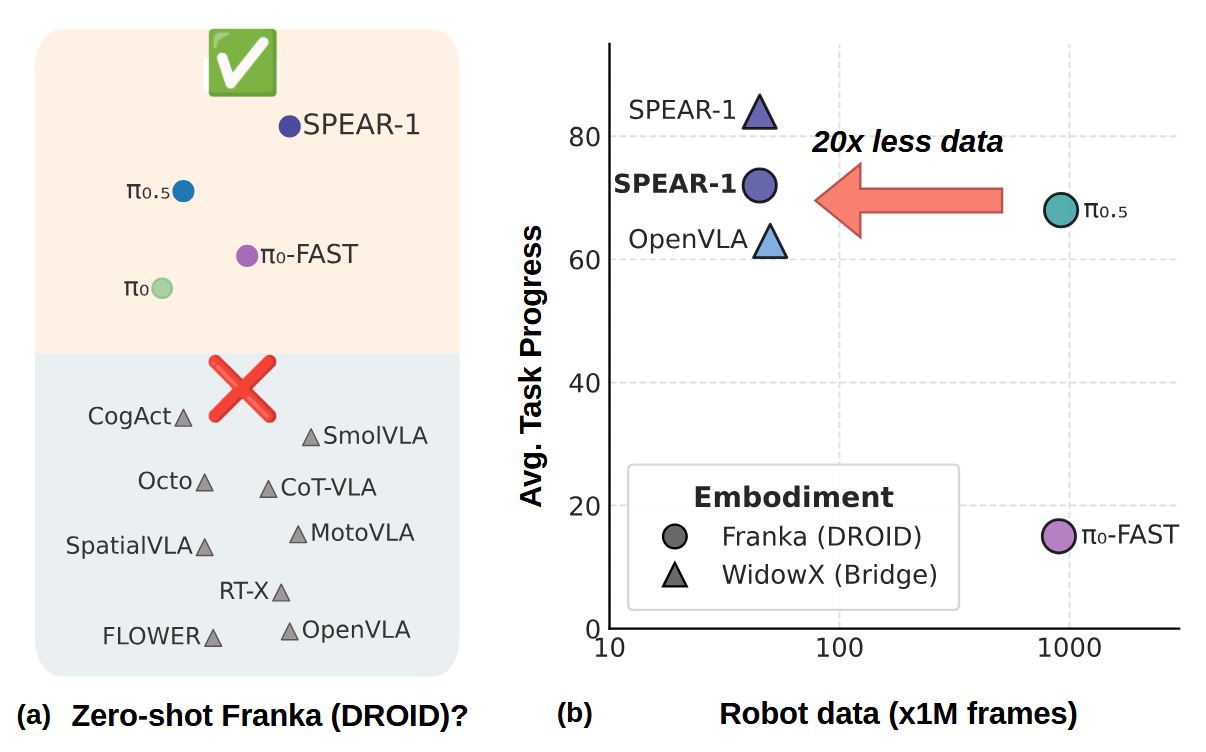
SPEAR-1: Scaling Beyond Robot Demonstrations via 3D Understanding
Nikolay Nikolov, Giuliano Albanese, Sombit Dey, Aleksandar Yanev, Luc Van Gool, Jan-Nico Zaech, Danda Pani Paudel SPEAR‑1 addresses limitations of robot imitation learning by fusing 3D perception with language‑based control. SPEAR-1 introduces a 3D‑aware vision–language model (SPEAR‑VLM) that jointly reasons about 3D scene geometry and human language instructions. This model powers a Vision‑Language-Action Model that…
-
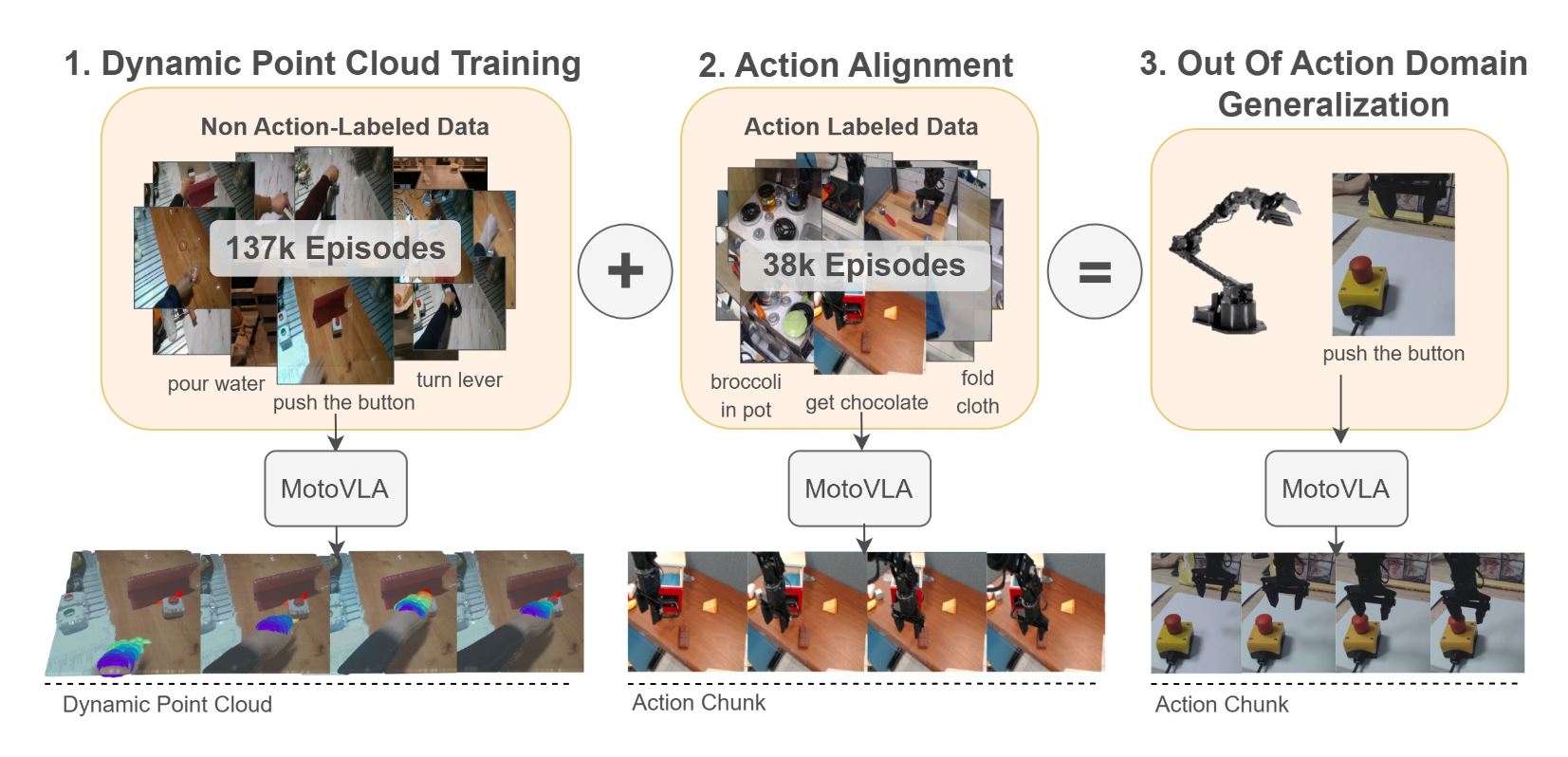
Generalist Robot Manipulation Beyond Action‑Labelled Data
Alexander Spiridonov, Jan‑Nico Zaech, Nikolay Nikolov, Luc Van Gool, Danda Pani Paudel MotoVLA reduces the dependency of generalist robot manipulation on action‑labelled demonstrations. It enables the use of unlabelled human and robot videos to learn object manipulation skills. This is achieved by extracting dense 3D point clouds around the hand or gripper from video data…
-
ReVLA@ICRA: Visual Robustness for Robotic Foundation Models
We have presented ReVLA, our first work at ICRA 2025 in Atlanta.
-
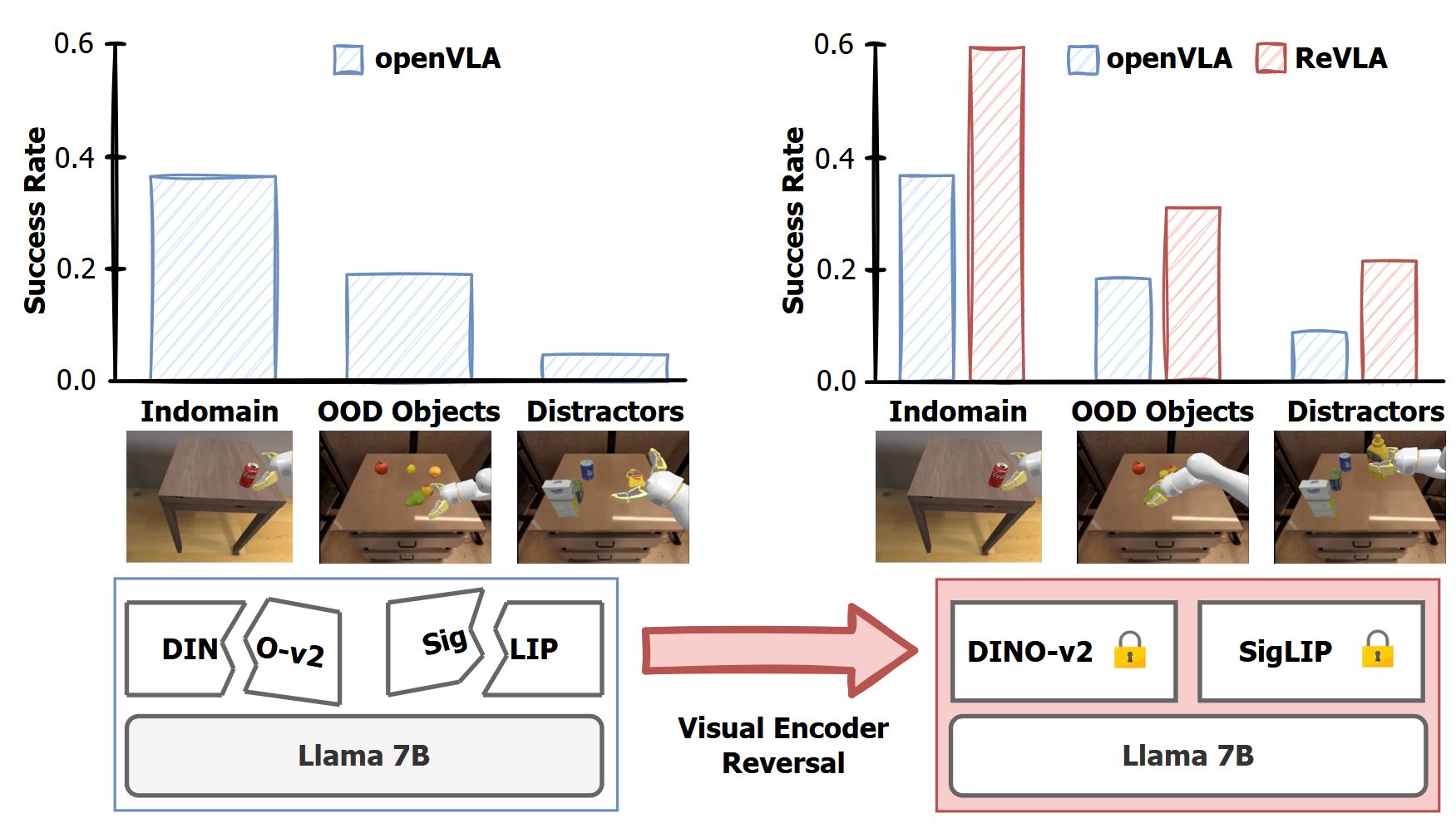
ReVLA: Reverting Visual Domain Limitation of Robotic Foundation Models
Sombit Dey, Jan-Nico Zaech, Nikolay Nikolov, Luc Van Gool, Danda Pani Paudel International Conference on Robotics and Automation, ICRA 2025 Abstract Recent progress in large language models and access to large-scale robotic datasets has sparked a paradigm shift in robotics models transforming them into generalists able to adapt to various tasks, scenes, and robot modalities.…